À l’aide des notebooks Jupyter en Python
L'un des avantages de travailler avec les notebooks Jupyter est de pouvoir les utiliser dans une approche client/serveur.
Chaque robot Poppy héberge un serveur Jupyter accessible via l'interface web (voir la section démarrage rapide pour plus de détails).
Lorsque vous travaillez via une simulation, tout est géré et stocké sur votre ordinateur. Lorsque vous travaillez avec un robot physique vous pouvez le programmer depuis un navigateur web sur votre propre ordinateur, mais vos notebooks Jupyter sont en fait stockés et exécutés dans le robot.
Donc pour passer de la simulation au robot physique, vous devez passer de votre instance locale Jupyter à l'instance hébergée par le robot. Les étapes sont décrites ci-dessous.
Se connecter à Jupyter sur le robot
Une fois connecté à l'interface web du robot http://poppy.local (nous supposerons ici que son nom d’hôte est poppy, remplacez-le par le nouveau nom d’hôte si vous l’avez changé), vous devriez voir un lien ouvrir notebook Ipython.
Lorsque vous cliquez dessus, Jupyter démarre sur le robot et vous redirige vers le serveur Web Jupyter. Vous devriez alors voir la racine du dossier notebook hébergé sur le robot :
C'est ici que vous pouvez mettre vos propre notebooks. Bien sûr vous pouvez créer des dossier, les organiser à souhait etc.
Note : Si vous avez besoin d'un accès plus précis ou d'une configuration plus avancée (telle qu'une autorisation), vous devez vous connecter au robot directement en utilisant SSH.
Télécharger un notebook
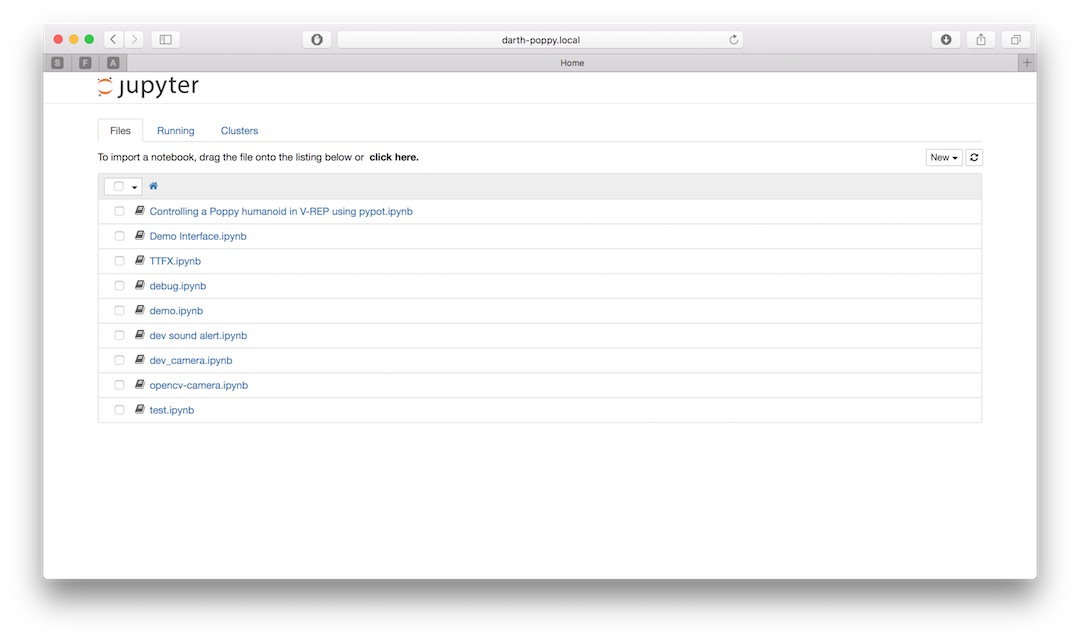
Une fois connecté au serveur Jupyter hébergé par le robot, vous pouvez directement utiliser l’interface Jupyter pour le téléverser de nouveaux notebooks.
Le bouton rond permet de télécharger votre notebook local, stocké sur votre propre ordinateur, au robot. Ils peuvent alors être directement exécuté sur le robot.
Sachez que pour le moment, nous ne traitons pas avec des autorisations ou des sessions (comme JupyterHub par exemple), et donc toute personne ayant accès au robot peut utiliser ou supprimer tous notebooks stockés dans le robot.
Adapter votre code
Il y a peu d’endroits où vous devez réellement modifier votre code pour qu’il fonctionne avec un robot physique. Nous essayons de minimiser l’effort nécessaire dans la mesure du possible, cependant certaines étapes sont encore nécessaires.
Instanciation
Lorsque vous créez le robot, vous devez en fait préciser si vous êtes disposé à travailler avec un robot physique ou un robot simulé. Cela se fait simplement via un paramètre. Par exemple :
En travaillant avec CoppeliaSim :
from pypot.creatures import PoppyHumanoid
poppy = PoppyHumanoid(simulator='vrep')
En travaillant avec le robot physique :
from pypot.creatures import PoppyHumanoid
poppy = PoppyHumanoid()
Bien évidemment, cela fonctionne pour tous les robots Poppy : Humanoid, Torso et Ergo Jr.
Il s’agit de la plupart des modifications que vous aurez à faire.
Les APIs spécifiques
Une partie de l'API dépend des plateformes. Par exemple, en utilisant CoppeliaSim vous avez accès aux fonctionnalités de tracking qui vous permet de récupérer n'importe quelle position 3D de l'objet. Mais cette méthode n'a pas d'équivalent dans le monde réel et n'est donc pas réalisable avec un robot physique.
Utiliser la propriété simulée est un bon entrainement si vous souhaitez écrire du code compatible pour les deux cas. Elle est automatiquement définie à la valeur correcte selon la façon dont vous instanciez votre robot. Par exemple,
poppy = PoppyHumanoid(simulator='vrep')
def reset_position():
if poppy.simulated:
poppy.reset_simulation()
else:
print('Ask one internship student to put the robot back in its origin position.')
time.sleep(10)
Version et bibliothèques tierces
Le principal inconvénient de travail avec le mode client/serveur est que les versions de vos logiciels installés localement peuvent différer de celui installé sur le robot.
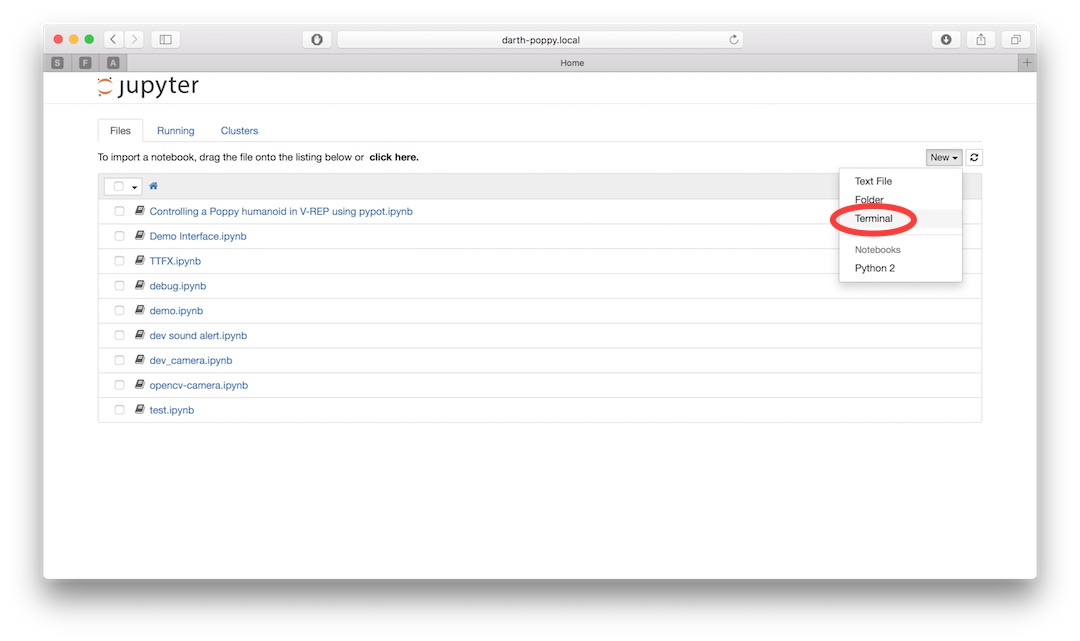
La version de Python installée sur le robot est Python 3 et dispose de la plupart des principales bibliothèques scientifiques (numpy, scipy, matplotlib, opencv). Une liste exhaustive des packages Python installés sera disponible bientôt < !--(TODO !)-->. Pour le moment, le moyen le plus simple d'y parvenir est d’utilisé un terminal notebook qui peut être exécuté directement depuis l’interface de Jupyter.
En utilisant la même technique, vous pouvez installer des bibliothèques tierces directement sur le robot. L' outils utilitaire pip est installé dans un environnement virtuel Python et devrait être utilisé lorsque cela est possible.
- Notez que la carte embarquée repose sur une architecture armv7 et donc certaines bibliothèques peuvent être difficiles à compiler. Nous maintenons une liste de recettes conda spécialement conçu pour cette plate-forme ici.
Plus de contributions sont les bienvenues ! *