Gallerie de notebooks Jupyter : programmer en Python
La plupart des exemples d'utilisation de Python avec les robots Poppy sont donnés avec les notebooks Jupyter. Nous encourageons fortement l’utilisation de cette application web, car elle permet la création et le partage de documents mélangeant du code, des éléments visuels et du texte explicatif. Par ailleurs, les notebooks permettent également la conception d'interface pour contrôler le robot en direct grâce à des widgets.
Pour chaque notebook, nous fournissons une courte description de qu'il fait, avec quel robot / simulateur il peut être utilisé et bien sûr un lien. Most of the notebooks are written in english but you will also find some in french (and hopefully soon in other languages).
Ce chapitre présente une série de notebooks et tente de les organiser en différentes catégories.
Premiers pas
Découvrez votre Poppy Ergo Jr : Notebook - Comment contrôler le robot, démarrer un comportement préprogrammé, envoyer des commandes moteur, obtenir les valeurs de capteurs ...
Controlling a Poppy Humanoid in CoppeliaSim: Notebook - Describe how to setup a Poppy Humanoid in CoppeliaSim and how to control it (motor control and sensor reading) from pypot in Python.
Record, Save, and Play Moves: Notebook - Simple introduction on how to record by demonstration moves on any Poppy Creature. It also shows how they can be re-played and saved/load to/from the disk.
Notebooks en français
- 10 choses à savoir avec Poppy Humanoid/ErgoJr et CoppeliaSim: pour l'ErgoJr, pour l'Humanoid - 10 informations de base pour bien commencer avec Poppy Humanoid ou Poppy ErgoJr simulés dans CoppeliaSim et comment les contrôler en Python.
Simulator
CoppeliaSim
Controlling a Poppy Humanoid in CoppeliaSim: Notebook - Describe how to setup a Poppy Humanoid in CoppeliaSim and how to control it (motor control and sensor reading) from pypot in Python.
Interacting with objects in CoppeliaSim: Notebook - Show how you can programtically add objects to the CoppeliaSim simulation and interact with them. This example uses a Poppy Torso but can be easily adapted to other creatures.
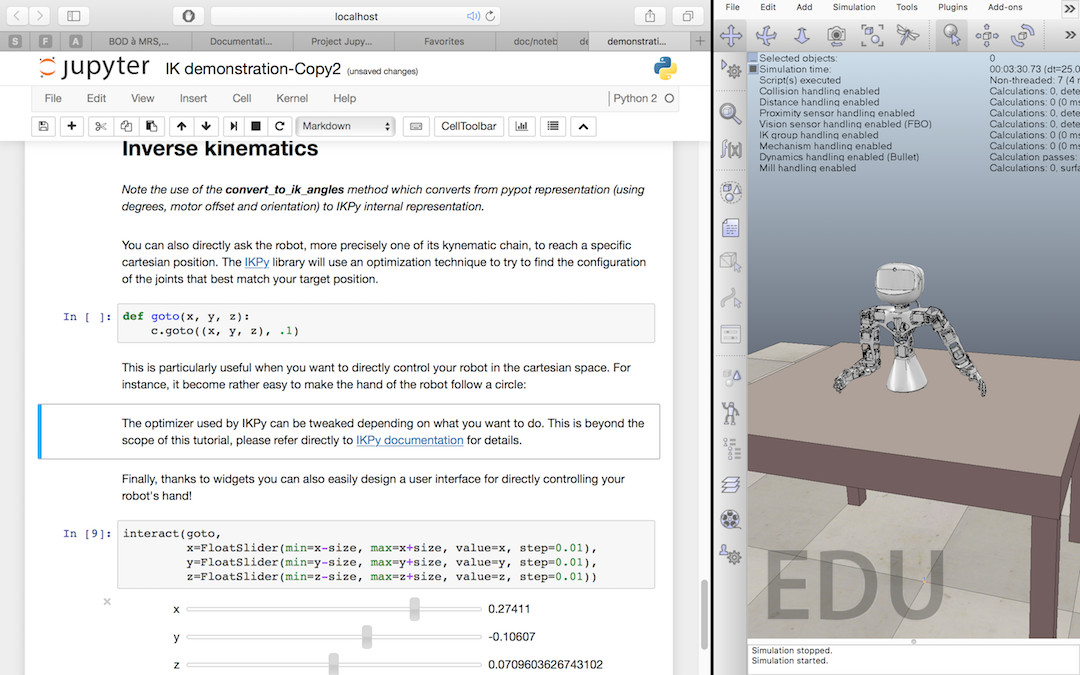
Learning the robot IK: Notebook - Demonstrate how explauto can be used to learn the inverse kinematics of a Poppy Humanoid. The experiments are run in CoppeliaSim simulation but it also gives hints on how it can be transposed in the real world.
Notebooks en français
- 10 choses à savoir avec Poppy Humanoid/ErgoJr et CoppeliaSim pour l'ErgoJr, pour l'Humanoid - 10 informations de base pour bien commencer avec Poppy Humanoid ou Poppy Ergo Jr simulés dans CoppeliaSim et comment les contrôler en Python.
HTTP REST API and remote connection
- Controlling a robot using HTTP requests: Notebook - Show how you can send HTTP requests to a robot, using the REST API, to control it. The notebook is based on a CoppeliaSim simulated Poppy Humanoid but can be adapted to other creatures.
Scientific experiments
Discover Explauto
- Learning the robot IK: Notebook - Demonstrate how explauto can be used to learn the inverse kinematics of a Poppy Humanoid. The experiments are run in CoppeliaSim simulation but it also gives hints on how it can be transposed in the real world.
Demo interface
- Primitives launcher for Poppy Humanoid: Notebook - Provides all codes needed to directly launched primitives (stand, sit, idle motions, limit torque...)
Education
Notebooks en français
Initiation à l'informatique en Lycée
Découverte: TP1, TP2, TP3 - Comprendre comment faire bouger simplement le robot. Utilisation des boucles. Ces TPs utilisent un Poppy Torso simulé dans CoppeliaSim.
Dialogue: TP1, TP2 - Établir un dialogue entre Python et le robot. Ces TPs utilisent un Poppy Torso simulé dans CoppeliaSim.
N'hésitez pas à nous faire savoir s'il manque certaines références d'ordinateurs portables! Vous pouvez directement envoyer une pull-request sur GitHub ou utiliser le gestionnaire de bug.