Assembly guide for the Ergo Jr
The Poppy Ergo Jr robot is a small and low cost 6-degree-of-freedom robot arm. It consists of very simple shapes which can be easily 3D printed. They are assembled via OLLO rivets which can be removed and added very quickly with the OLLO tool.
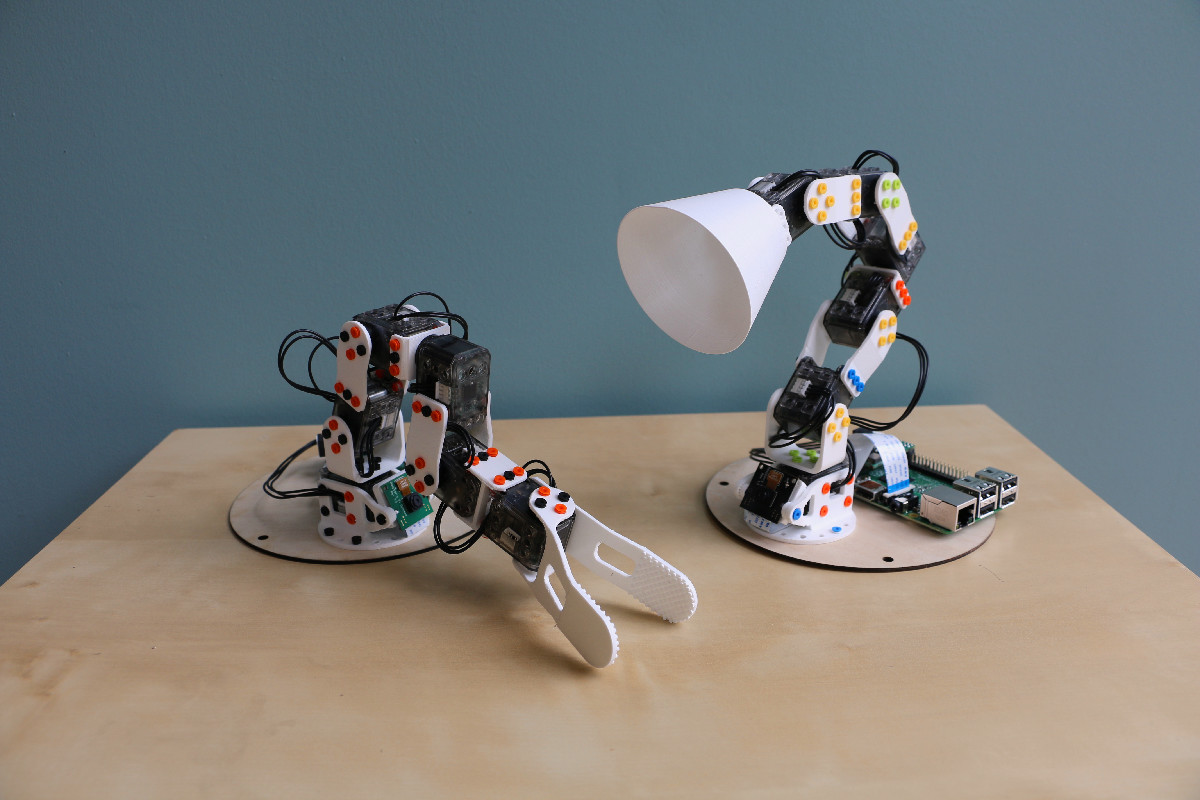
Its end effector can be easily changed. You can choose among several tools:
- a lampshade,
- a gripper,
- or a pen holder.
Thanks to the rivets, they can be very quickly and easily swapped. This allows the adaptation of the tooltip to the different applications you plan for your robot.
This chapter will guide you through all steps required to entirely assemble a Poppy Ergo Jr. Follow these steps:
The entire assembly should take about 3/4 hours for the first time you build one. With more practice, half an hour should be enough.