Visualize the robot in a simulator
Simulated Poppy Creatures
Simulated versions of all Poppy robots (Humanoid, Torso, and Ergo Jr) are available.
Connection with two main "simulators" were developed:
- using CoppeliaSim: a virtual robot experimentation platform
- using a 3D web viewer: lighter but without physics support
At the moment, only the Poppy Ergo Jr can be used in the web visualizer. If you want to simulate other creatures, you should use CoppeliaSim. Support for the other robots is planned but not expected in the near future.
We think simulation can be a powerful tool. It allows the development and test of programs without the need of having a real robot. This is especially useful:
- To discover and try the robot possibilities without having to spend real money.
- In a context where multiple users share a robot. For instance in a classroom where each group can work using the simulator and validate their program on a real robot.
- To design and run complex and time consuming experiments.
We try to make the switch from a simulated Poppy robot to the real one as transparent and as simple as possible. Most of the programming documentation is actually valid for both simulated and real robots. The chapter From simulation to real robot will guide you in the few steps to transform your program running in simulation to one working with a real robot.
If you want to use Poppy robots using a simulator you will have to install some of the poppy libraries locally on your computer.
Install the needed software
Info: A full section is dedicated on how to install everything locally for using a simulator if you need more details.
While the physical robots come with an embedded computer pre-installed, you need to install some software libraries on your computer to control simulated Poppy creatures. You will also not have access to the robot web interface. You will have to manually launch the different services to start programming your robot (the Jupyter server for Python notebooks, or the Snap! server).
To start controlling a simulated Poppy robots, either using CoppeliaSim or the web visualizer, you will need:
- Python >= 3.5
- The Python library pypot
- The Python library corresponding to your creature (e.g. poppy-ergo-jr)
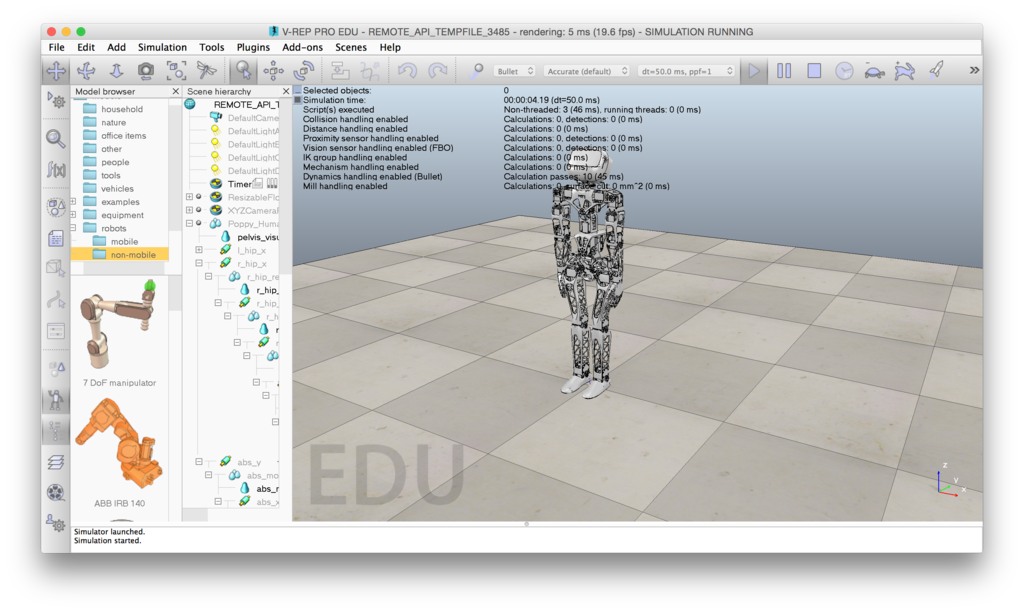
Using CoppeliaSim (Formerly named V-REP)
CoppeliaSim is a well known and powerful robot simulator. It is widely used for research and educational purposes. Moreover, it is available for free under an educational license. It can be download from this website (works under Mac OS, Windows and GNU/Linux).
It is important to note that as CoppeliaSim is simulating the whole physics and rendering of the robot, it may be slow if you do not have a powerful computer (especially the GPU card).
All main Poppy robots are available in CoppeliaSim:
- Poppy Humanoid
- Poppy Torso
- Poppy Ergo Jr
V-REP can be used to learn how to control motors, get information from sensors but also to interact with the simulated environment. It can be controlled using Python, Snap! or through the REST API. Here, are some examples of what the community has already been doing with it:
- A pedagogical activity to discover the different motor of your robot and how they can be controlled.
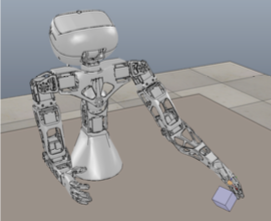
- A scientific experiment, where a Poppy Torso is learning how to push a cube on a table in front of it

Even if we try, to reproduce the robot behavior and functioning, some differences remain. In particular, if you make a robot walk in simulation that does not necessarily mean that it will walk in the real world (and vice-versa).
To start the simulated robot, first open CoppeliaSim and instantiate you robot with simulator='vrep' argument. CoppeliaSim will open a popup that you will have to close to enable to communication between CoppeliaSim and Python.
from pypot.creatures import PoppyErgoJr
robot = PoppyErgoJr(simulator='vrep')
If you want to control a simulated robot from Snap, you can also start it directly from the command line interface poppy-services in your terminal (called command prompt on Windows):
poppy-services --vrep --snap poppy-ergo-jr
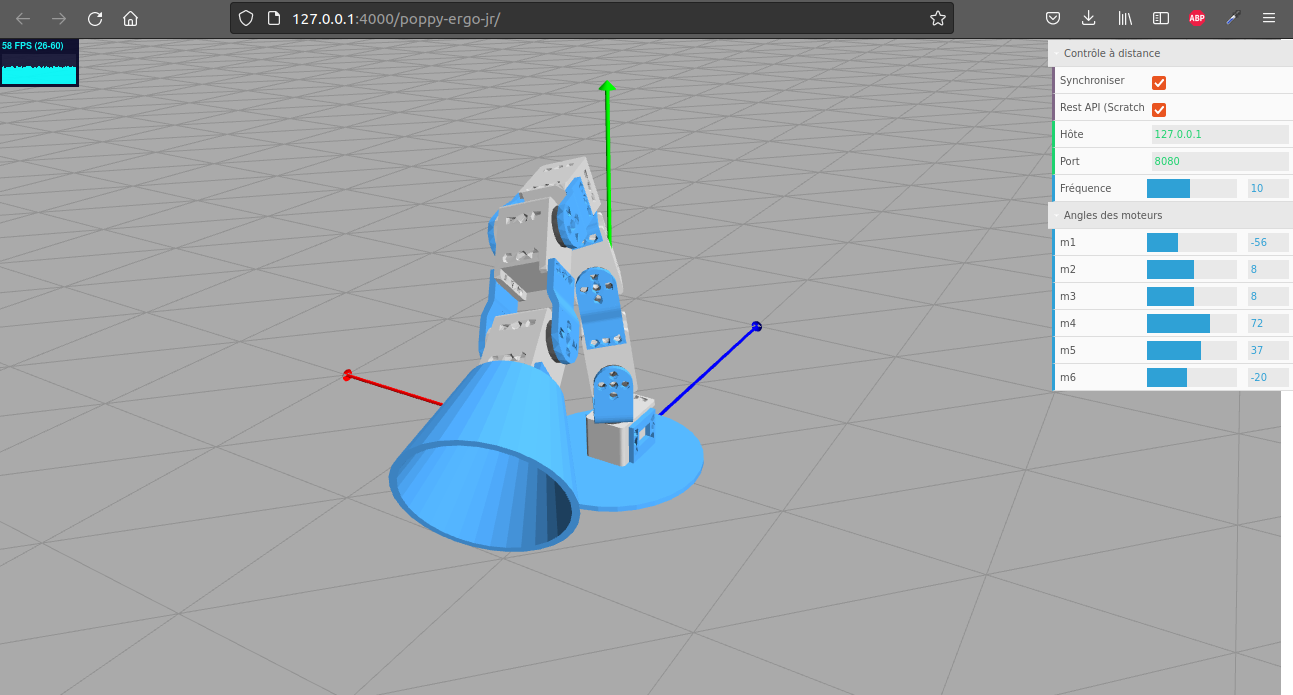
Using our web visualizer
Our web visualizer will show you a 3D representation of a Poppy robot. For this, you will need to connect it to either a real robot (through the REST-API) or to a simple mockup robot running on your computer. You simply have to set the host variable from within the web interface to match the address of your robot.
In Python, you can start the mockup robot with:
from pypot.creatures import PoppyErgoJr
robot = PoppyErgoJr(simulator='poppy-simu')
Add a use_snap=True argument if you want to start Snap API.
If you want to command the mockup robot from Snap or Scratch, you can also start it directly from the command line interface poppy-services in your terminal (called command prompt on Windows):
poppy-services --poppy-simu --snap poppy-ergo-jr
poppy-services --poppy-simu --scratch poppy-ergo-jr
You should select the API you want to use with the API checkbox. By default, REST API is used (for Scratch), but you should select the Snap API to control your robot with Snap.
As for CoppeliaSim, you can control your robot using Python, Scratch, Snap!, or the REST API. Yet, there is no physics simulation so its lighter but you will not be able to interact with objects.
Here is an example with Python: