Jupyter Notebooks Gallery: using Python
Most of the existing examples of using Poppy robots in Python are given as Jupyter Notebooks. We strongly encourage the use of this web application as it allows "the creation and sharing of documents that contain live code, visualization and explanatory text". Furthermore, they also permit the design of interface for live controlling a robot thanks to widgets.
For each notebook, we provide a short description of what it does, with which robot/simulator it can be used and of course a link. Most of the notebooks are written in english but you will also find some in french (and hopefully soon in other languages).
This chapter presents a gallery of notebooks and tries to organize them into different categories.
Getting started
Discover your Poppy Ergo Jr: Notebook - Begin controlling your robot, launch behavior, send motor command, get values from the sensor...
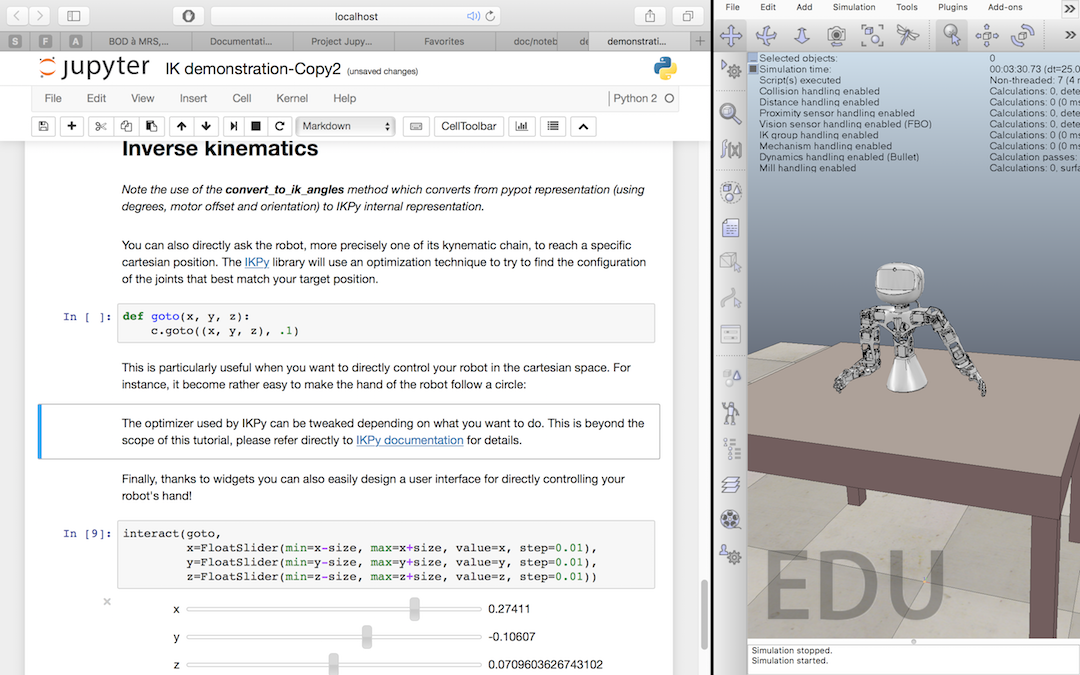
Controlling a Poppy Humanoid in CoppeliaSim: Notebook - Describe how to setup a Poppy Humanoid in CoppeliaSim and how to control it (motor control and sensor reading) from pypot in Python.
Record, Save, and Play Moves: Notebook - Simple introduction on how to record by demonstration moves on any Poppy Creature. It also shows how they can be re-played and saved/load to/from the disk.
Notebooks en français
- 10 choses à savoir avec Poppy Humanoid/ErgoJr et CoppeliaSim: pour l'ErgoJr, pour l'Humanoid - 10 informations de base pour bien commencer avec Poppy Humanoid ou Poppy ErgoJr simulés dans CoppeliaSim et comment les contrôler en Python.
Simulator
CoppeliaSim
Controlling a Poppy Humanoid in CoppeliaSim: Notebook - Describe how to setup a Poppy Humanoid in CoppeliaSim and how to control it (motor control and sensor reading) from pypot in Python.
Interacting with objects in CoppeliaSim: Notebook - Show how you can programtically add objects to the CoppeliaSim simulation and interact with them. This example uses a Poppy Torso but can be easily adapted to other creatures.
Learning the robot IK: Notebook - Demonstrate how explauto can be used to learn the inverse kinematics of a Poppy Humanoid. The experiments are run in CoppeliaSim simulation but it also gives hints on how it can be transposed in the real world.
Notebooks en français
- 10 choses à savoir avec Poppy Humanoid/ErgoJr et CoppeliaSim pour l'ErgoJr, pour l'Humanoid - 10 informations de base pour bien commencer avec Poppy Humanoid ou Poppy Ergo Jr simulés dans CoppeliaSim et comment les contrôler en Python.
HTTP REST API and remote connection
- Controlling a robot using HTTP requests: Notebook - Show how you can send HTTP requests to a robot, using the REST API, to control it. The notebook is based on a CoppeliaSim simulated Poppy Humanoid but can be adapted to other creatures.
Scientific experiments
Discover Explauto
- Learning the robot IK: Notebook - Demonstrate how explauto can be used to learn the inverse kinematics of a Poppy Humanoid. The experiments are run in CoppeliaSim simulation but it also gives hints on how it can be transposed in the real world.
Demo interface
- Primitives launcher for Poppy Humanoid: Notebook - Provides all codes needed to directly launched primitives (stand, sit, idle motions, limit torque...)
Education
Notebooks en français
Initiation à l'informatique en Lycée
Découverte: TP1, TP2, TP3 - Comprendre comment faire bouger simplement le robot. Utilisation des boucles. Ces TPs utilisent un Poppy Torso simulé dans CoppeliaSim.
Dialogue: TP1, TP2 - Établir un dialogue entre Python et le robot. Ces TPs utilisent un Poppy Torso simulé dans CoppeliaSim.
Do not hesitate to let us know if some cool Notebooks are missing! You can directly send pull-request on GitHub or use the issue tracker.