Program Poppy robot with ROS
ROS is a toolbox for creating robots, very popular in academia. It is designed for advanced users.
Compatibility of robot and ROS versions
In order to use your Poppy robot with ROS you need ROS 1 Noetic with Ubuntu 20.04. Version ROS 2 supports Windows ans MacOS, but Poppy is not yet compatible.
Only Poppy Ergo Jr has a total compatibility with ROS with software above v4.0.0. Previous version numbers do not support ROS. Check your software version number in the top right of your robot's homepage http://poppy.local.
For Torso and Humanoid, some packages are available though, for advanced users.
3-steps installation
1. Install ROS Noetic
Please refer to the installing procecure of ROS Noetic. The procedure is successful when typing command roscore starts a ROS master sucessfully, that you can stop by pressing Ctrl+C.
2. Install MoveIt 1.0
MoveIt is a toolbox for ROS allowing to facilitate the creation of manipulator robots. It has tools for trajectory planification, 3D perception, kinematics and control.
Please refer to the installing procedure of MoveIt.
3. Download the integration of Poppy robots in ROS
Finally, you need to download the 3 required ROS packages in your ROS workspace and to compile them with catkin_make:
cd ~/catkin_ws/src
git clone https://github.com/poppy-project/poppy_ergo_jr_description/
git clone https://github.com/poppy-project/poppy_ergo_jr_moveit_config
git clone https://github.com/poppy-project/poppy_controllers
cd ~/catkin_ws && catkin_make
source ~/catkin_ws/devel/setup.bash
Use Poppy with ROS
Overview of the ROS API for Poppy
The Poppy robot implements the following ROS topics and services:
- The topic
/joint_statespublishes the current joint angles and speeds - The action server
/follow_joint_trajectoryallows to control the robot by executing trajectories of typetrajectory_msgs/JointTrajectory - The service
/set_compliantallows to en(dis)able the robot compliance - The service
/get_imageallows to grab an image from the camera - The service
/close_gripperallows to close or open the gripper (motor m6 of the Ergo Jr) - The parameters
/gripper/angles/apertureand/gripper/angles/closuredefine the range of aperture of the gripper (in degrees from about -20° to +30°) - The parameter
/gripper/speeddefines the opening/closing speed from 0.05 (slowest) to 1 (fastest)
Start the robot controllers (aka Poppy ROS services)
Connect to the robot's homepage http://poppy.local and select Programming and then ROS:
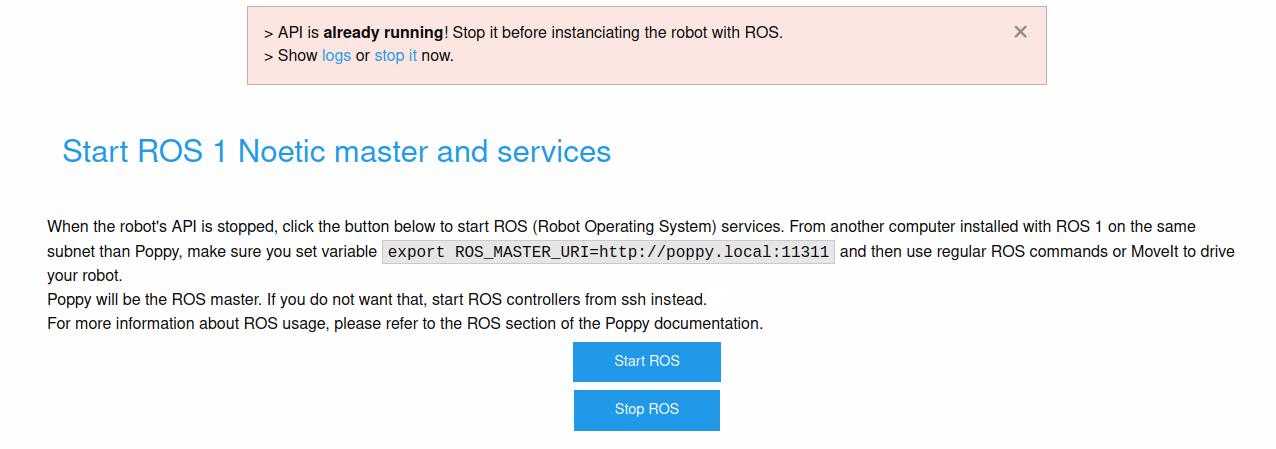
This button sarts ROS controllers on the robot itself. In that case, the robot will be the ROS master and you will need the following environment variable on your workstation:
export ROS_MASTER_URI=http://poppy.local:11311
# change poppy.local for the name of your robot if you changed it
Note : In the particular case where you would need another ROS master or you would need peculiar launchfile options, do not use the "STart ROS" button and check that the robot API is stopped. Then connect to the robot with ssh and launch the launchfile manually as below:
ssh poppy@poppy.local # password poppy
export ROS_MASTER_URI=http://poppy.local:11311 # Set your ROS master
roslaunch poppy_controllers control.launch # It is the regular launchfile started by the button "Start ROS"
Trigger compliance, an image shot, or the gripper closure via a service call
Activating the compliance, an image shot, or the gripper closure and opening are trigger via a service call, either from a Python node, or from command line as presented below:
rosservice call /set_compliant "data: true"
# The service must return a success message:
# success: True
# message: "Robot compliance has been enabled"
The following piece of Python code (in a ROS node) allows to grab an image from the Poppy's camera and convert it to OpenCV's image format:
import cv2
from poppy_controllers.srv import GetImage
from cv_bridge import CvBridge
get_image = rospy.ServiceProxy("get_image", GetImage)
response = get_image()
bridge = CvBridge()
image = bridge.imgmsg_to_cv2(response.image)
cv2.imshow("Poppy camera", image)
cv2.waitKey(200)
Warning: Make sure you control if the image has a correct size before using it. A fault camera would return an iamge with no dimension.
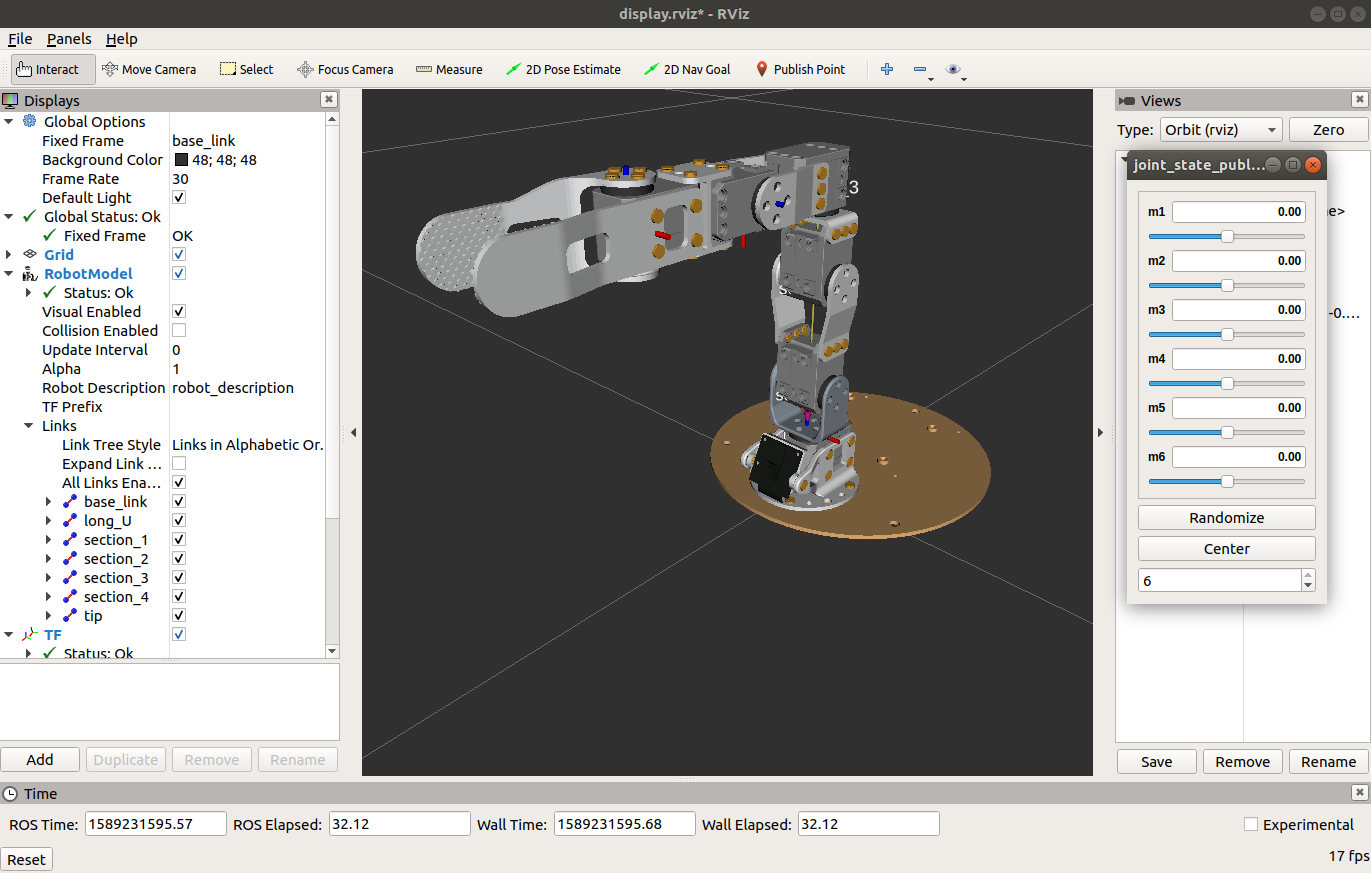
Example: Plan trajectories with MoveIt
MoveIt allows to generate trajectories by avoiding obstacles (either hardcoded obstacles or coming from a 3D camera)

Start Moveit with a simulated robot
Start MoveIt with parameter fake_execution to true to simulate a robot:
roslaunch poppy_ergo_jr_moveit_config demo.launch fake_execution:=true gripper:=true
Or with the lamp end-effector:
roslaunch poppy_ergo_jr_moveit_config demo.launch fake_execution:=true lamp:=true
Start MoveIt with a tangible robot
With a tangible robot, first start the Poppy controllers as shown before, and then on your workstation start MoveIt with parameter fake_execution to false:
roslaunch poppy_ergo_jr_moveit_config demo.launch fake_execution:=false lamp:=true
The blue ball of the end effector allows to set a cartesian value to reach, and the "Plan and Execute" button triggers a collision-free trajectory computation and executes it on the robot.
Record and replay feature
To record a trajectory, it is handy to enable compliance and manipulate the robot with your hands:
rosservice call /set_compliant "data: true"
However, it is also totally fine to record a trajectory played by MoveIt or any other way.
Then, open a Jupyter notebook or an ipython interactive interpreter and use the following functions to record, for instance, a 5sec trajectory:
import rospy
from poppy_ros_control.recorder import Recorder
rospy.init_node("trajectory_recorder")
r = Recorder()
r.start_recording()
# Move your robot with your hands in compliant mode to record its trajectory
rospy.sleep(5)
r.stop_and_save("my_motion_name")
Trajectories are stored in JSON files in the poppy_controllers/data directory.
Later, you can replay them this way:
import rospy
from poppy_ros_control.recorder import Player
from moveit_commander.move_group import MoveGroupCommander
rospy.init_node("trajectory_player")
commander = MoveGroupCommander("arm_and_finger")
player = Player()
# This returns a moveit_msgs/RobotTrajectory object representing the recorded trajectory
my_motion = player.load("my_motion_name")
# Go to the start position before replaying the motion
commander.set_joint_value_target(my_motion.joint_trajectory.points[0].positions)
commander.go()
# Replay the exact same motion
commander.execute(my_motion)
Troubleshooting
Invalid Trajectory: start point deviates from current robot state more than 0.2
You're probably trying to replay a trajectory while your robot didn't reach the starting point first. Make sure you reach it with set_joint_value_target.
ABORTED: Solution found but controller failed during execution
Is your robot compliance disabled? No trajectory can be executed with compliance.
Robot makes abrupt trajectories
- If you are replaying a recorded trajectory, make you you first join its initial point before starting replay: use
set_joint_value_targetfirst beforeexecute - Poppy Ergo Jr's motors have a range of [-170°, +170°] = [-0.94 rad, +0.94 rad], if your trajectories don't fit this interval, you will likely have erratic movements, thus:
- keep away from U-turns (~ 180° = 3.14 rad) for each motor when recording a trajectory
- make sure your motors are not mounted backwards :
set_joint_value_target([0, 0, 0, 0, 0, 0])must bring your robot in that exact configuration: